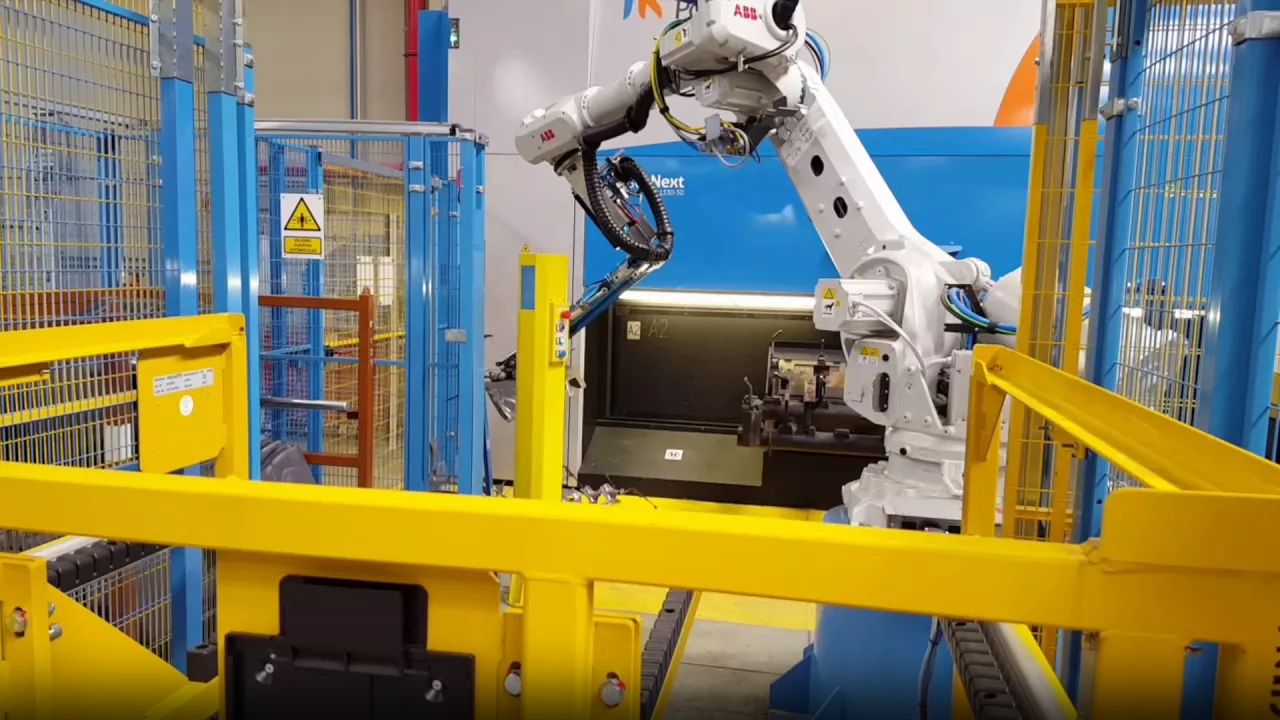
3D定位: 借助激光实现定位
简易、快速地定位半成品零件或者成品
- 自动完成随机摆放的零件包括复杂零件的抓取任务
- 保证持久、稳定的生产节奏(根据机器人的尺寸、一般配置、扫描仪的性能或者在延时工作时间段的性能等等因素的不同,抓取每个零件需时4至12秒)
- 保证抓取零件的精确位置并可重复定位(根据零件的尺寸不同,位置精度介于0.1毫米至0.5毫米之间)

工业需求
- 自动完成随机摆放的零件包括复杂零件的抓取任务
- 保证持久、稳定的生产节奏(根据机器人的尺寸、一般配置、扫描仪的性能或者在延时工作时间段的性能等等因素的不同,抓取每个零件需时4至12秒)
- 保证抓取零件的精确位置并可重复定位(根据零件的尺寸不同,位置精度介于0.1毫米至0.5毫米之间)

完整流程
例如,在抓取零件的定位循环后,这个循环将重新执行。
01
扫描
3D传感器把真实场景扫描成3D点云的形式。

02
定位
通过把点云和CAD模型比对的方式分析虚拟的工作场景(插图中的黄色部分)。 通过这个比对,可以在从半成品零件(灰色的点)上获取的点云内部定位真实的零件(绿色的点)。

03
抓取
可选项: 如果需要的话,碰撞管理模块可以检查机器人夹具是否能抓取零件,而机器人可以接收到实时的位置信息。
