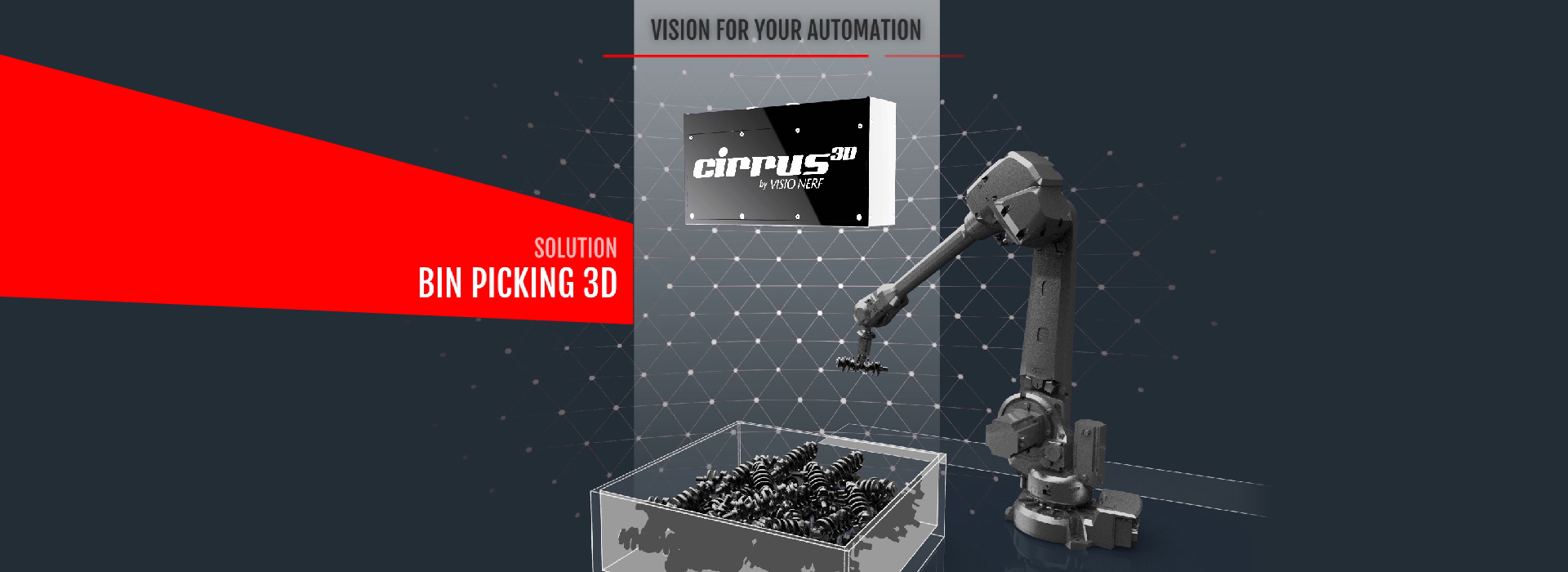
Presa da cassone robotizzata 3D
CRITERIO BASILARE
Combina il file CAD del pezzo con una serie di misurazioni 3D rilevate nell’area di lavoro, comprese le parti da prelevare e l’ambiente (cassone o altro). Il confronto della nuvola di punti virtuale digitalizzata con il modello CAD del pezzo consente di individuare i pezzi nell’area di lavoro e il software brevettato eyesberg3D garantisce che i pezzi vengano prelevati senza collisioni. Il robot riceve in tempo reale la posizione del pezzo da prelevare e svuota completamente il contenitore pezzo per pezzo.
La presa da cassone si basa sulla collaborazione robot-visione: la visione guida il robot per eseguire le operazioni.

ESIGENZE INDUSTRIALI:
- Automatizza le attività di presa anche di pezzi complessi disposti alla rinfusa
- Automatizza le operazioni di prelievo e posizionamento (pick and place)
- Evitare costi di imballaggio aggiuntivi
- Garantisce un ciclo costante e regolare (da 1 secondo per pezzo prelevato a seconda delle dimensioni del robot, della configurazione generale e della scansione in tempo mascherato … )
- Garantire un posizionamento preciso e ripetibile delle parti raccolte (da circa 0,1 mm a 0,5 mm in base alle dimensioni della parte)
- Garantire la non collisione della pinza con l’ambiente durante il prelievo

Processo completo
01
Digitalizzazione
cirrus3D digitalizza l’area di lavoro reale sotto forma di nuvola di punti 3D. Il sensore utilizza la tecnologia stereo visione per acquisire la nuvola di punti 3D e quindi garantire la qualità delle informazioni contenute nella scansione per ottenere le massime prestazioni nei risultati della scansione. L’utente ha la possibilità di definire graficamente i parametri della scena di raccolta : volume di lavoro, densità dei punti contenuti nella nuvola di punti …

02
La posizione
Il software eyesberg3D individua il pezzo migliore da prelevare all’interno della nuvola di punti. Al fine di garantire il prelievo, le possibili aree di sovrapposizione degli altri pezzi vengono simulate costruendo un’area di lavoro virtuale. Il software gestisce anche il calcolo della traiettoria del robot per evitare qualsiasi collisione con l’ambiente di lavoro.

03
Prelievo dei pezzi
Il robot riceve la posizione (3 coordinate in traslazione) e l’orientamento (3 coordinate in rotazione) del pezzo da prelevare, nonché una “possibile” scelta di prelievo tra le diverse strategie di prelievo che la tecnologia eyesberg3D consente di insegnare al robot in anticipo. Quindi il robot è programmato per scegliere tra loro in base ai propri vincoli (accessibilità, singolarità …) e scegliere la parte più accessibile

04
Robot Path Planning
Il sensore guida il robot all’interno del cassone. Ciò semplifica l’applicazione del robot e riduce i tempi di integrazione. Inoltre, la gestione delle collisioni è meglio compresa e più precisa per consentire al robot di “tuffarsi” nel cassone. Integrazione semplificata e più breve unita a una migliore produttività: ROI rapido.
Bin Picking : Applicazioni
La tecnologia del sensore di visione 3D sviluppato da VISIO NERF può guidare il robot nelle operazioni di presa, al fine di depositare automaticamente le parti:
– Sul nastro trasportatore
– Asservimento macchine utensili: Pressa, Centro di lavoro, Granigliatrice, Sbavatura, …
– In scatole
– Su rack
– In una posa
– E molto altro …