Localizzazione 3D: individuare utilizzando un sensore 3D
POSIZIONA FACILMENTE E RAPIDAMENTE LE PARTI GREZZE O FINITE
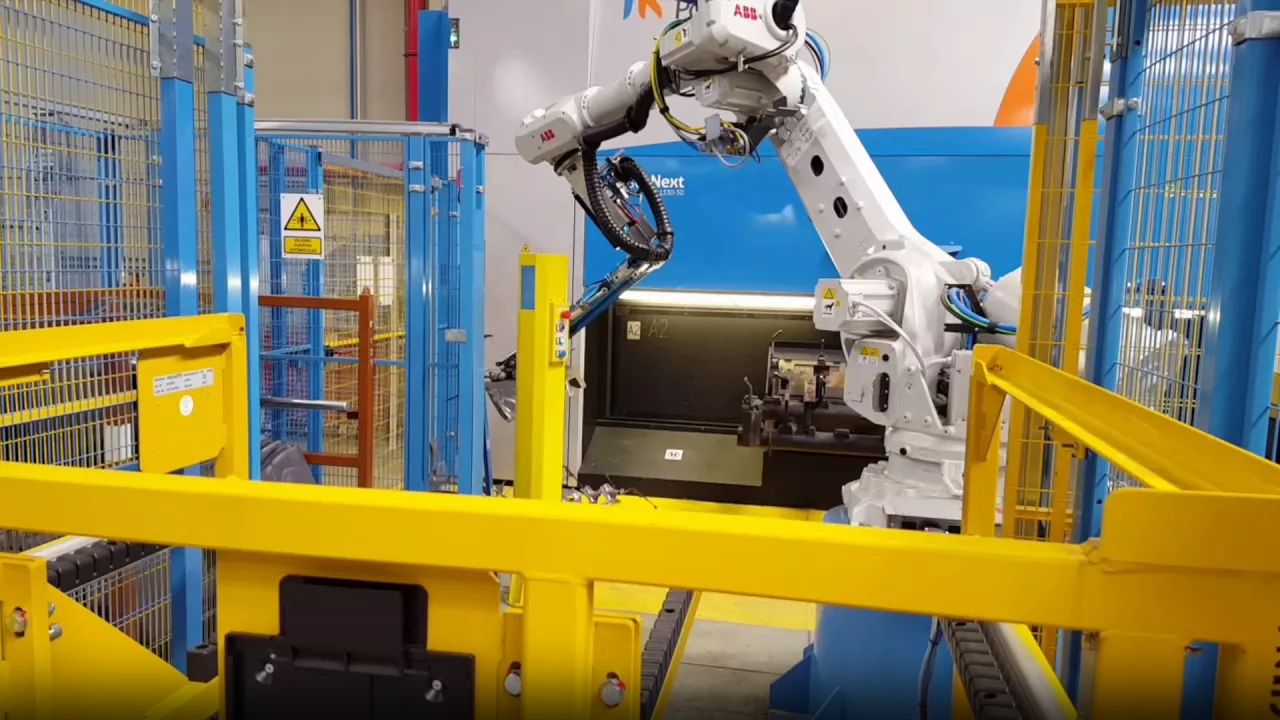
- Automatizza le attività di prelievo delle parti anche per parti complesse disposte in modo casuale
- Garantire un ciclo costante e regolare (da 4 a 12 secondi per parte prelevata in base alle dimensioni del robot, alla configurazione generale e alla scansione in tempo mascherato)
- Garantire un posizionamento preciso e ripetibile delle parti raccolte (da circa 0,1 mm a 0,5 mm a seconda delle dimensioni della parte)

Esigenze industriali:
- Automatizza le attività di prelievo delle parti anche per parti complesse disposte in modo casuale
- Garantire un ciclo costante e regolare (da 4 a 12 secondi per parte prelevata in base alle dimensioni del robot, alla configurazione generale e alla scansione in tempo mascherato)
- Garantire un posizionamento preciso e ripetibile delle parti raccolte (da circa 0,1 mm a 0,5 mm a seconda delle dimensioni della parte)

Il processo completo
Ad esempio, seguendo un ciclo di localizzazione per il prelievo dei pezzi, il ciclo verrà eseguito nuovamente
01
Digitalizzazione
Il sensore 3D digitalizza la scena di lavoro sotto forma di una nuvola di punti 3D.

02
Localizzazione
Analisi della scena di lavoro confrontando la nuvola di punti con il modello CAD (evidenziato in giallo negli esempi). Questo confronto consente di individuare la parte reale (punti verdi) all’interno della nuvola di punti acquisita sulla parte grezza (punti grigi).

03
Raccolta delle parti
Opzionale: Se necessario, il modulo di gestione delle collisioni verifica che la pinza possa prelevare la parte mentre il robot riceve la posizione in tempo reale.
