Localisation 3D : Localiser avec un capteur 3d
Localisez facilement et rapidement vos pièces brutes ou finies.
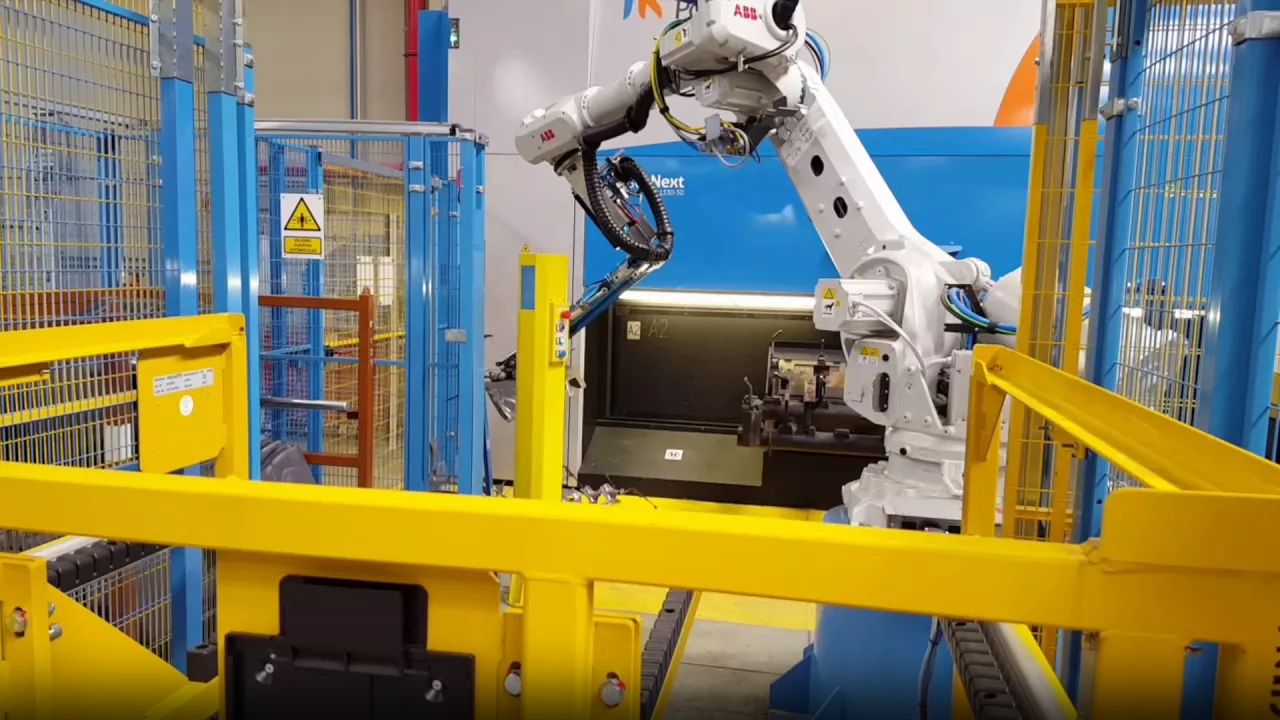
- Automatiser des tâches de préhension de pièces même complexes disposées aléatoirement
- Garantir une cadence soutenue et constante (4 à 12 secondes par pièce saisie en fonction de la taille du robot, de la configuration générale et du fait de scanner ou non en temps masqué …)
- Garantir un positionnement précis et répétable des pièces saisies (de l’ordre de 0.1 mm 0.5 mm en fonction de la taille de la pièce)

Les besoins industriels :
- Automatiser des tâches de préhension de pièces même complexes disposées aléatoirement
- Garantir une cadence soutenue et constante (4 à 12 secondes par pièce saisie en fonction de la taille du robot, de la configuration générale et du fait de scanner ou non en temps masqué …)
- Garantir un positionnement précis et répétable des pièces saisies (de l’ordre de 0.1 mm 0.5 mm en fonction de la taille de la pièce)


Le processus complet.
Après un cycle de localisation pour prise de pièce par exemple, le cycle sera de nouveau exécuté.
01
La numérisation
Le capteur 3D numérise la scène réelle sous la forme d’un nuage de points 3D.

02
La localisation
Analyse de la scène de travail virtuelle par comparaison du nuage de points avec le modèle CAO (en jaune sur les illustrations). Cette comparaison permet de localiser la pièce réelle (points verts) au sein du nuage de points acquis sur la pièce brute (points gris).

03
La préhension
Optionnelle: si besoin, le module de gestion de collision vérifie que le préhenseur peut saisir la pièce dont le robot reçoit la position en temps réel.
