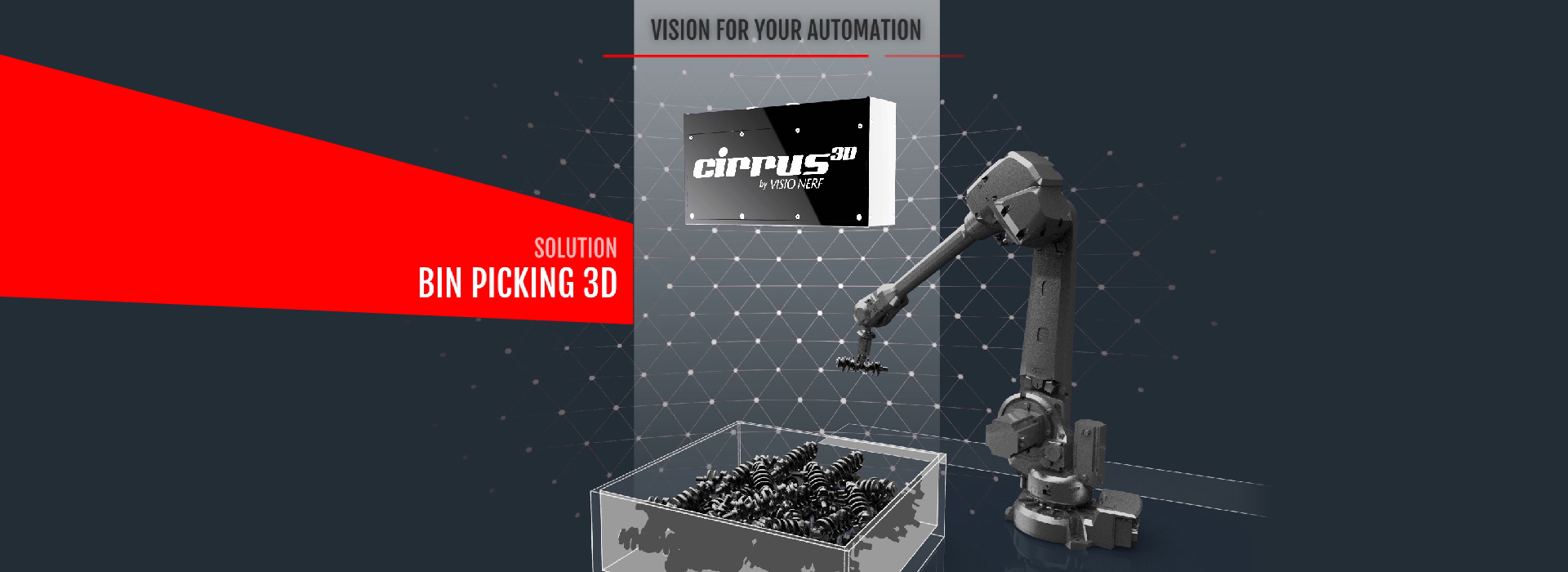
Dévracage robotisé 3D
Principe de base
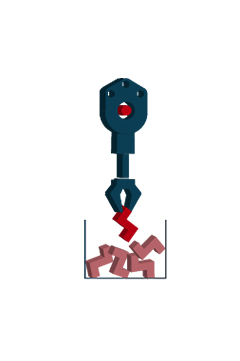
Combiner le fichier CAO de la pièce avec un ensemble de mesures 3D effectué sur la scène de travail comprenant les pièces à saisir et l’environnement (conteneur ou autre). La comparaison entre le nuage de points virtuel numérisé et le modèle CAO de la pièce permet de localiser les pièces dans la scène de travail, et le logiciel breveté eyesberg3D garantit une prise de pièce par le système sans collision. Le robot reçoit en temps réel la position de la pièce à saisir et, pièce par pièce vide entièrement le conteneur pour réaliser un « dévracage ».
Le bin picking repose sur la collaboration robot-vision : la vision guide le robot pour effectuer des opérations.

Les besoins industriels :
- Automatiser des tâches de préhension de pièces même complexes disposées en vrac, ou bien qu’elles soient rangées ou semi rangées pour réaliser le bin picking
- Automatiser les opérations de pick and place
- Éviter des surcoûts de conditionnement
- Garantir une cadence soutenue et constante (à partir de 1 seconde par pièce saisie en fonction de la taille du robot, de la configuration générale et du fait de scanner ou non en temps masqué …)
- Garantir un positionnement précis et répétable des pièces saisies (de l’ordre de 0.1 mm 0.5 mm en fonction de la taille de la pièce)
- Garantir la non collision de la pince avec l’environnement lors de la préhension


Le processus complet
01
La numérisation
Le cirrus3D numérise la scène de travail réelle sous la forme d’un nuage de points 3D. Le capteur utilise la technologie de la stéréovision pour l’acquisition du nuage de points 3D et ainsi assurer la qualité des informations contenues dans le scan pour des performances maximales dans les résultats de la numérisation. L’utilisateur a la possibilité de définir graphiquement les paramètres de la scène de bin picking : volume de travail, densité de points contenus dans le nuage de points…

02
La localisation
Le logiciel eyesberg3D localise la meilleure pièce à saisir à partir de ces mesures 3D par comparaison avec le modèle CAO de la pièce. Afin de garantir la préhension, les éventuelles zones de recouvrement par les autres pièces sont simulées en construisant une scène de travail virtuelle. Le logiciel prend également en charge le calcul de la trajectoire robot pour éviter toute collision avec l’environnement de travail.

03
La préhension
Le robot reçoit la position (3 composantes en translation) et l’orientation (3 composantes en rotation) de la pièce à saisir, ainsi qu’un « choix possible » de préhensions parmi les différentes stratégies de préhensions que la technologie eyesberg3D® vous permet de préalablement apprendre au robot.

04
Robot Path Planning
Le capteur prend en change la trajectoire robot à l’intérieur de la benne pour le bin picking. Ainsi, l’applicatif robot devient plus facile et le temps d’intégration est réduit. De plus, la gestion des collisions est mieux appréhendée et plus précise pour permettre au robot de « plonger » dans la benne. Une intégration simplifiée et moins longue associée à une meilleure productivité : un ROI rapide.
Bin Picking / Dévracage 3D : Applications
La technologie de capteurs de vision 3D développée par VISIO NERF permet de guider le robot dans des tâches de dévracage, afin de déposer en automatique les pièces :
- Sur convoyeur
- Machines outils : Presse, Centre d’usinage, Grenailleuse, Ébavurage, …
- Dans des cartons
- Sur rack
- Dans un posage
- Et bien plus …